Nový robotický červ ze Stanfordu bude zachraňovat přeživší při katastrofách
Nafukovací robot s kamerou se proplazí k uvězněným přeživším a udrží je při životě
Je to robot, červ nebo snad robotická rostlina?
Při katastrofách se oběti i záchranáři ocitají v extrémních situacích. Vědci a inženýři pro takové případy vyvíjejí technologie, které budou pomáhat zachraňovat životy. Jejich vzhled přitom může být roztodivný.
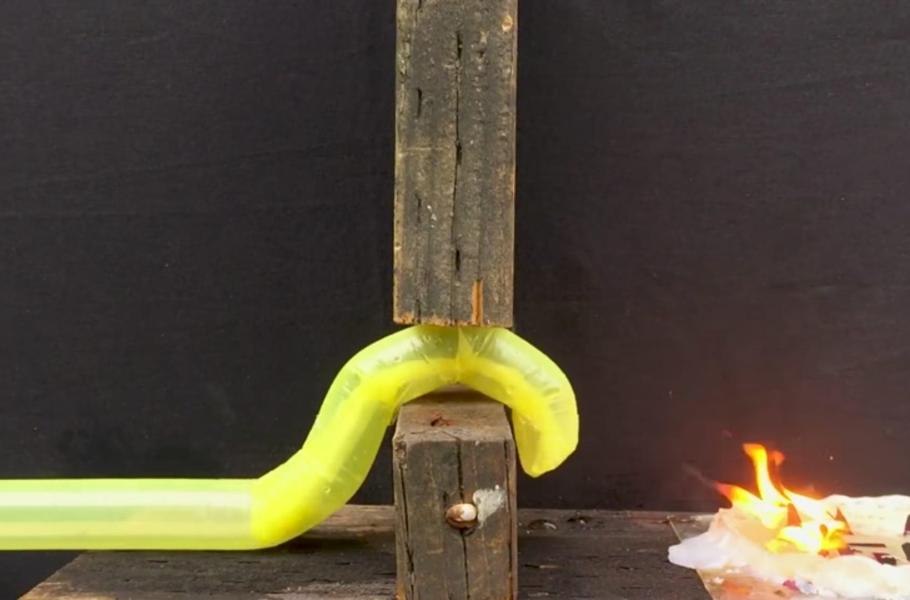
Už jsme viděli drony, miniaturní roboty a dokonce i zvířecí kyborgy. Odborníci ze Stanfordu vyvinuli měkkého nafukovacího robota, který připomíná hada, ale pohybuje se spíše jako velký červ nebo žížala. Podle některých připomíná spíše rostlinu než živočicha.
TIP: Lehčí než vzduch: Nový nafukovací robot se svaly měří 20 metrů
Robot je vybavený kamerou a měl by pronikat k přeživším, kteří budou uvězněni v téměř neprostupné suti. Měl by jim přinášet naději na vysvobození a také je dokáže zásobovat nezbytnou vodou, než přijde čas jejich záchrany.