Kráčející ANYmal C je robotický kontrolor pro průmyslové závody
Nový čtyřnohý autonomní robot zvládne kontrolovat provoz i ve složitých podmínkách
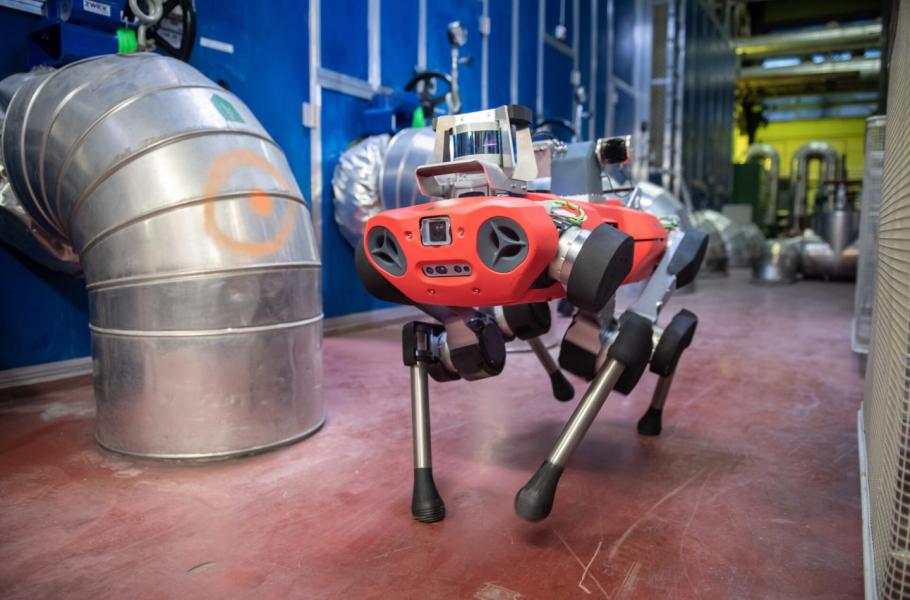
Anymal C na inspekci
Robotická ZOO se úspěšně rozrůstá. Švýcarská společnost ANYbotics v těchto dnech představila novou a vylepšenou variantu svého čtyřnohého kráčejícího robota, která nese jméno ANYmal C. Díky svým končetinám se robot může pohybovat v komplikovaném terénu, včetně sutin nebo třeba schodiště.
Životním prostředím robota ANYmal C by měly být továrny a další průmyslová zařízení, jako například plynové generátory. Jeho hlavním úkolem tam budou kontroly a monitorování takových zařízení. Kráčející robot může být ovládán dálkově lidským operátorem anebo se může pohybovat autonomně.
TIP: Boston Dynamics oslavili brzké zahájení prodeje robotickým spřežením
50-kilogramový robot je odolný vůči prachu i vodě. Jeho navigaci zajišťuje soustava senzorů, včetně LiDARu, optických a termálních kamer, LED osvětlení, a také detektorů plynů. Anymal C může kráčet rychlost 1 metru za sekundu. Energii mu dodává baterie, která po jednom nabití vydrží asi na 2 hodiny provozu. Když se výdrž baterie chýlí ke konci, tak robot autonomně vyhledá nabíjející stanici a dobije si baterii.




