Autonomní rovery jsou jako bobři: Stavějí improvizované cesty
Nové algoritmy umožňují robotům zvládat terén v místech katastrof i ve volné přírodě
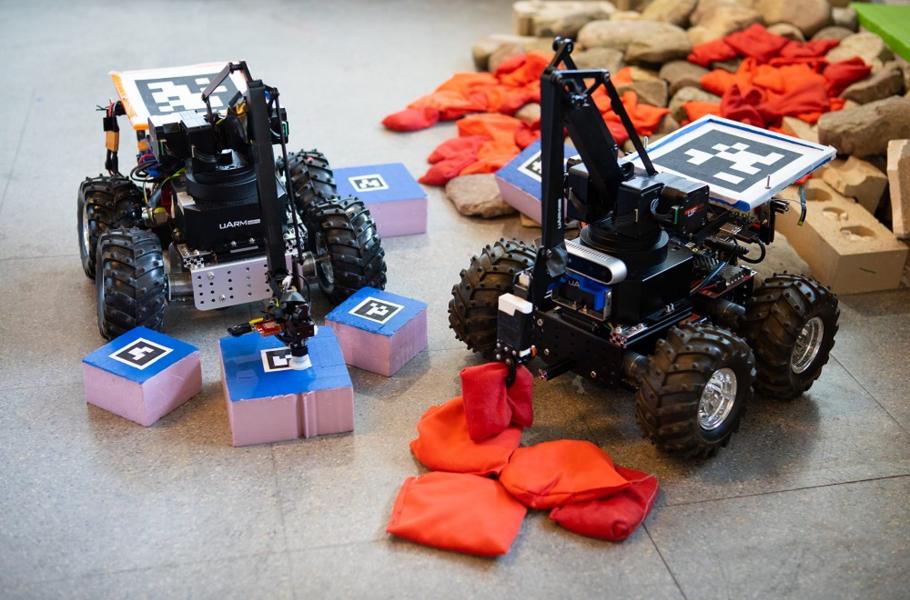
Autonomní rovery se stavebním materiálem
V dnešní době se už konečně objevují dávno předpovězení autonomní roboti, kteří pomáhají v továrnách, ve skladech nebo třeba vítají hosty na hotelových recepcích. Zatím se ale jen velmi zřídka vydávají do terénu, kde musejí zvládat nečekané situace a výzvy.
Američtí vědci nedávno vyvinuli autonomní boty v podobě malých roverů, kteří si v případě potřeby mohou vybudovat cestu a překonat tak překážky, na které narazí. Podle autorů jsou autonomní rovery jako bobři. Ti nestavějí hráze podle nějakého pevně daného plánu, ale reagují na tekoucí vodu. Když někde teče voda, tak se ji bobři snaží zastavit.
TIP: Autonomní auta jezdí rallye: Inženýři vylepšují jejich vlastnosti v terénu
Autonomní rovery jednají podobně. Neustále sledují okolí, a když je to nutné, tak upraví terén s dostupným materiálem tak, aby mohly projet. Projekt je součástí vývoje algoritmů pro umělé inteligence, které pomáhají robotům zvládat nepředpověditelné prostředí v místě nehod, katastrof nebo prostě ve volné přírodě.




