Kapesní robot ElectroSkin se dokáže plazit i lézt po zdech
Měkcí roboti kombinují pokročilé technologie triky Matky přírody
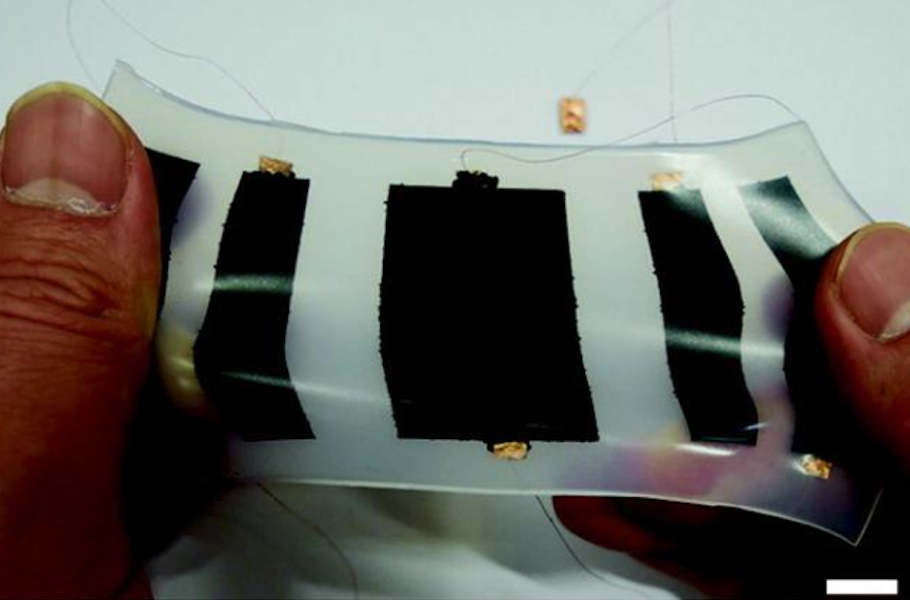
ElectroSkin je jako robotický slimák
Koho by napadlo, že dnešní roboti se budou plazit jako slimáci? Vědci a inženýři britské Bristol University se při vývoji nových měkkých robotů inspirovali právě slizkým světem hlemýžďů a slimáků. Výsledkem jejich úsilí je malý, měkký a velmi ohebný robot, kterého si klidně můžete stočit do ruličky a dát do kapsy.
Nový robot dostal přiléhavé jméno ElectroSkin. Může se plazit a klidně zvládne lézt po zdi. Tak jako jiní podobní roboti se i tento robotický slimák spoléhá na elektrostatické síly, jimiž se přichycuje k podkladu. Když se ElectroSkin pohybuje, využívá elektrické umělé svaly, které napodobují pohyb svalů přírodních slimáků při lezení.
TIP: Rychlý a elastický jazyk chameleonů inspiroval tvůrce měkkých robotů
Jeho tvůrci si dovedou představit celou řadu zajímavých aplikací, od průzkumu a monitorování nebezpečných míst, jako jsou zhroucené budovy a místa podobných katastrof, přes pohyblivé senzory, až po autonomního uklízeče zdí. V takovém případě by byl robot ElectroSkin vybavený soustavou senzorů a dalšími přístroji. V budoucnu by se mohli objevit pokročilí měkcí roboti, které bude snadné dopravit na místo určení a když na to přijde, budou je lidé nosit i jako součást oděvu.