Skoro jako lidská: Robotická ruka s měkkými prsty se dokonce i potí
Tvůrci nové měkké robotické ruky se inspirovali u savců. Problém s nadbytečným teplem vyřešili chlazením pomocí pocení
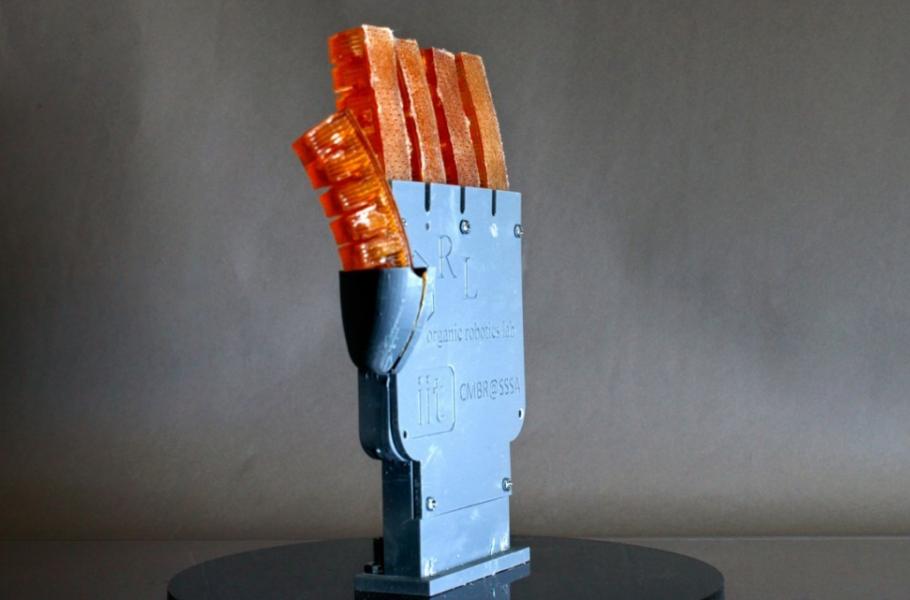
Potící se měkká robotická ruka
S postupným rozvojem měkké a organické robotiky se robotická stvoření stávají více a více podobnými člověku. Rozhodně to platí i pro novou technologii amerických organických robotiků, kteří unikátním způsobem vyřešili problém s nadbytečným teplem, jenž pronásleduje prakticky každé elektronické zařízení. Jejich robotická ruka se 3D tištěnými měkkými prsty se totiž potí.
V řadě případů se pro odvod nadbytečného tepla používají kovové struktury nebo třeba větráky rozmanitých tvarů a velikostí. Problém je v tom, že taková řešení nejsou příliš užitečná pro roboty postavené z měkkých materiálů. Přesto i tito roboti nějak musí řešit potíže s přehříváním.
TIP: Rychlý a elastický jazyk chameleonů inspiroval tvůrce měkkých robotů
Organickým robotikům nakonec pomohli savci, kteří už před dlouhými miliony let vymysleli skvělý způsob ochlazování pocením. Měkký materiál v nové robotické ruce je vytvořený ze dvou měkkých polymerů. Když teplota materiálu zvýší nad 30 °C, jeden z polymerů se smrští a vytlačí do druhého polymeru vodu. Tento polymer obsahuje mikropóry podobně citlivé na teplo. Pocení dokáže snížit teplotu robotické ruky na 21 °C během 30 sekund. Jakmile teplota materiálu poklesne pod 30 °C, mikropóry se opět uzavřou a robotická ruka tak elegantně reguluje svou teplotu.